 United States of America (1972-1982)
United States of America (1972-1982)
Research Vehicle – 1 Built
This science-fiction sounding vehicle was a real project from 1973 by the Stevens Institute of Technology to create a new type of Armored Personnel Carrier (APC) capable of significantly improved cross-country abilities by using the novel means of articulation and force-feedback control. Such ideas have been around an extremely long time, dating back as far as World War I. However, this idea, although it used two M113’s, was not to create an M113 per se, but to research the technology required for an articulated or coupled APC which would then be used in the development process of something new. In this regard then, the CCRV can be considered to be little more than a curiosity test-rig, although it did later receive an official nomenclature, the M226 (M113 + M113 = M226), not to be confused with the grenade launcher of the same name.
For reference, an articulated vehicle is a single vehicle with more than one hull designed to operate in one-piece, whereas a coupled vehicle is a single vehicle made from two or more separate vehicles coming together or separating as required.

Original concept art for the M226. Source: TARDEC/TACOM
The test-rig was put together as part of the US Arm’s ‘New Initiatives Program’ under the management of the US Army Tank-Automotive Command (TACOM). It was itself built on previous military vehicle articulation studies carried out with the ‘Jeep-Train’ (4 Jeeps coupled together) and the ‘Polecat’ (2 Polecats coupled together) as TACOM knew that articulation offered particular benefits, specifically that “coupling and/or articulation produces sufficient gains in mobility and allows the coupled units to negotiate certain terrain features which would be impassable to a single frame vehicle”. The entire project was funded in 1972 with an increased budget for mobility work for terrestrial and mobility investigations increasing from US$2.6m in 1971 to US$3.4m in 1972, and US$3.1m for the financial year 1973. The budget was not a large one and the whole project was expected to conclude within 1-2 years. Work was to take place primarily at the Army’s facilities at Keewenaw, Michigan.
The M113 had the significant advantage for the study in that it was very cheap, in plentiful supply and simple enough that the required modifications could be done relatively easily.

Cybernetically Coupled M113’s form the M226. Photo: SIT
Requirements
Given the potential of this twin-hull articulating/coupled concept, the mobility requirements were set high. This CCRV would have to be able to climb a vertical step 5 feet (1.5 m) high, cross a trench up to 10 feet (3 m) wide, and climb a 60% slope consisting of a low friction surface such as mud or snow. It would also have to be able to flex across the joint between the hulls for a maximum articulation of +/-45 degrees and a yaw of +/-30 degrees. Further, the vehicle had to climb a 2 ½ foot (0.76 m) obstacle at 2.5mph (4 km/h), operate over different types of adverse terrain including inland waterways, sand, snow, and mud and be controllable independently from either the front or rear units.

Coupling between the two M113s. The A-frame is mounted on the front of the following vehicle. Photo: SIT
Cybernetic Coupling
The M113s used were standard production vehicles so require little description, as the only modification on the exterior was the coupling. The articulation for the vehicles attached together was by means of a ball joint allowing freedom for the hulls to roll, pitch, and yaw but where the extent of the movement was controlled by means of two hydraulic cylinders.
Control for the cylinders and thus the whole articulation was simple too. They were controlled by just a single joystick lever in the driver’s compartment which constituted the entirety of the modifications for the driver. Obviously, with the requirement for both hulls to be able to control steering, this was duplicated into both driver’s compartments. In addition, both the engine and transmissions of the vehicles were synchronized, but each vehicle was still fully capable of independent operation when uncoupled.

M226 seen at the Keweenaw Research Center 1973. Note the white markings on the front and rear corners as the dashed white line along the side above the track guard. These markings were to assist in analyzing the movement of the vehicle, including in water. Photo: TARDEC/TACOM
The movement of the cylinders was simple and used only commercially available parts (with the exception of the mounts to the hull for the cylinders and drawbar which were bespoke) and controlled by means of an electro-hydraulic servo system, unlike the engine and transmission, which used an electro-mechanical system instead.
The actual connection between the vehicles consisted of a single spherical ball joint mounted at the end of an A-frame drawbar mounted permanently to the front of the following vehicle connecting to a mount at the rear of the front vehicle fixed at the geometric centre of rotation between them and as far forward as possible to counter the inherent ‘nose-heaviness’ of the M113.

Details of the connections between lead and following M113s. The hydraulic cylinders are attached to the lead vehicle. Photo: SIT
The following vehicle, therefore, required relatively little modification with just the control for the driver and mounts for the connections added. The lead ‘master’ vehicle, however, was modified. Not just the A-frame and cylinders but these hydraulic cylinders also required an actuator in the form of a 45 gallon (US) (170 litre) per minute variable-delivery in-line pump and these were installed in the troop space of the lead vehicle.

M226 pitching up (left), displaying yaw (center) and pitching down (right). Photos: SIT
Control
The driver, to adjust the pitch and yaw angles of the vehicles, merely had to move his joystick backwards to pitch the vehicles up, or forwards to pitch them down, as it either produces more or less pressure in the top cylinders bringing the hulls either further apart, or together, respectively. Sideways motion (yaw) was equally simple. A move of the joystick to the left produced a pressure increase in the right cylinder and a reduction in the left cylinder slewing the lead vehicle to the left and a turn to the right was effected in the opposite manner. Pitch and yaw could be done simultaneously with an infinite variation in the position of the joystick, but a return to ‘neutral’ in the centre simply aligned the two hulls once more and locked them together. The system could be adjusted so that the driver could get positive feedback from the control too if required, although this was not necessary for it to work. If that system was chosen though, then “the cybernetic force feedback control system applies a force to the control stick proportional to the forces generated by the actuators” and that “the force feedback system applies a force to the control stick proportional only to those forces acting to pitch the vehicle” as the forces during yaw would cancel each other out.
Testing
The system was built and began testing in 1974 with both the cybernetic feedback and without it and was found to successfully be able to negotiate V-shaped ditches up to 10 feet (3 m) wide, trenches up to 11 feet (3.4 m) wide, and a vertical step up to 4 ½ feet (1.4 m) high although it was felt that the vehicle could actually perform more than this albeit requiring new obstacles to be constructed.


M226 crossing 10’ (3 m) V-Ditch (left) and climbing a 4 ½’ (1.4 m) step circa 1973. Photos: SIT
The steering was found to be stable and rigid even at top steep across country with the system superior to a single vehicle in every respect except for turning radius, for which there was a very significant increase to 40 feet from 14 (12.1 metres from 4.3 metres).
On marginal ground, the M226 had improved traction with less slip proving the concept valid especially for soft ground and likewise, they proved superior to an individual vehicle when climbing short and long slopes. On a short slope, the lead vehicle ‘pulled’ the following vehicle, but on the long slopes, due to weight transfer, it was the rearmost vehicle ‘pushing’ the lead vehicle up the slope.
One small feature not mentioned during the trials was that small box structures were added to the roofs of both front and rear M113’s by 1974 around the driver’s area. It is not clear why this was done but was likely a result of the water testing trials to prevent the vehicles from becoming swamped. This additional freeboard is likely a modification just for the testing rather than a production modification.

M226 seen in 1973 and 1974 with a new superstructure built on top of the front of each cab to assist and protect the driver. Photo: TARDEC/TACOM
Regarding the optional cybernetic feedback, the experiments showed that it should be used as it provided assistance for the driver, particularly in climbing vertical obstacles. However, it was a hindrance in crossing a wide trench where the lead vehicle was unsupported because with the feedback in place it simply fell into the ditch. An additional finding was that the servo control speed needed improving too for cross-country travel at over 15 mph (24 km/h).
The conclusions of the trials in 1974 were simple. The system worked. It worked well. The controls were easy to manage and the maneuverability benefits cross-country were impressive, even using M113s as donors. The system was proven to work so was carried forward with plans for post-1974 trials to focus on performance in winter conditions and then into the spring for water trials and then back to obstacle crossing with new, larger obstacles prepared to test the limits of the system. Additional instrumentation would be fitted for analysis with a view towards using this technology for a variety of roles:
- Producing kits to modify existing vehicles in service.
- Kits to permit commercial vehicles to meet military requirements.
- Reduction of water resistance for amphibious vehicles.
- Assist amphibious assault vehicles in breaching defences.
- Marrying high mobility and low mobility vehicles together for specific roles.
- Using the system to marry APC’s and tanks to provide armor protection for infantry teams.

M226 exiting the water after trials in 1974. Steering was by means of controlled yaw whilst drive was just from the tracks. Photo: TARDEC/TACOM
The success of the 1974 trials had prompted further trials of the concept, not just with this CCRV prototype, but even considerations of using the LVTP-7 coupled. By 1980, the CCRV had completed trials in water and, like the LVTP work, had shown that a coupled vehicle had much lower water resistance than two individual vehicles. Between 1974 and 1985, TACOM/TARDEC tested a variety of coupled vehicle concepts including these M113s, Cobras, Polecats, the BV-206, and the UDES XX. By 1980, the trials of the coupled M113’s were pretty much over. The concept had been proven to work and could be adopted to other ideas, including for coupled heavier vehicles including the M1 coupled concept.
The M226 was repainted. The lead vehicle retained its standard Army green with a single white star on each side and the white plumbline markings. In contrast, the rear vehicle was repainted into army 3-tone camouflage pattern and the coupling was yellow. The fate of the vehicle post-testing in the 1980’s is not known.

M226 in 1980 during testing in winter conditions. The following vehicle has been repainted into a standard 3-tone camouflage pattern whilst the lead vehicle retains its original paint scheme for testing. Photo: TARDEC/TACOM
Source
Cybernetically Coupled Research Vehicle. (1974). Ronald Beck and Irmin Kamm, Stevens Institute of Technology, USA
50 years of the International Society for Terrain-Vehicle Systems: Ground Vehicle Mobility, Modeling and Simulation ar TACOM-TARDEC ‘A Brief History’ (2012). Dr. Peter Kiss and Dr. Sally Shoop Editors. International Society for Terrain-Vehicle Systems, Germany
The Water Performance of Single and Coupled LVTP-7’s, with and without bow plane extensions. (1980). Irmin Kamm and Jan Nazalwicz. Ship Research and Development Center, Office of Naval Research, Department of the Navy.
Drag Studies of Coupled Amphibians. (1966). R.L. Van Dyck and I. R. Ehrlich. Office of Naval Research, Department of the Navy.
Department of Defense Appropriations for Fiscal Year 1973. (1973). United States Congress Appropriations Committee
Analysis of Obstacle Negotiation by Articulated Tracked Vehicles: The State of the Art. (1981). Peter Brady. Naval ship Research and Development Center, Office of Naval Research
An Evaluation of the Coupled LVT Concept. (1979). Irmin Kamm, Peter Brown, and Peter Brady. David Taylor Naval Ship Research and Development Center, Stevens Institute of Technology, USA

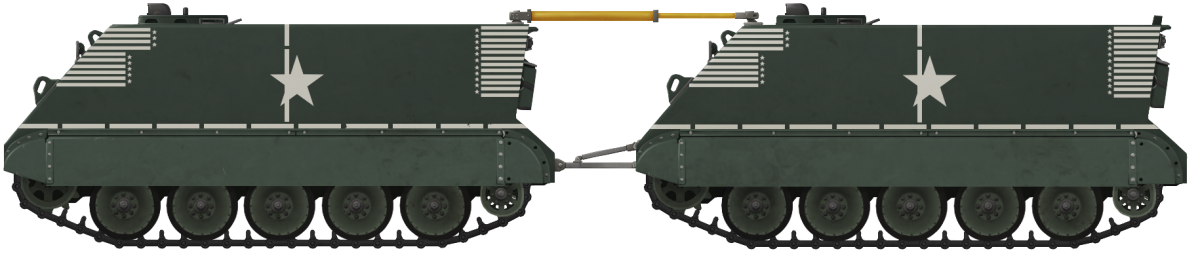
The M226 in the color scheme it would’ve borne in the 1970s. Both vehicles are in an olive drab scheme with white stripes painted on the corner of the vehicles.

The M226 in its 1980s paint scheme with the rear vehicle repainted in the standard US 3-tone camouflage pattern.
Both illustrations were produced by Andrei ‘Octo10’ Kirushkin, funded by our Patreon Campaign.
10 replies on “M226 (M113 Cybernetically Coupled Research Vehicle ‘CCRV’)”
Did this research ever produce a series of vehicles or were they all for nothing?
Alas, all for nothing thus far.
That’s too bad, it seems like useful technology; I’m shocked we haven’t even seen it in video games either.
I’m a big fan of yours by the way, thanks for your time 🙂
I thik your definition of “articulated” is lacking. It clearly means two unit halves (or parts) that operate as one vehicle by MOVING DIFFERENTIALLY. You just say “two units that operate as one vehicle”. If I weld a girder between two truck frames, thats not articulated (although you could call it ‘coupled’ I suppose). For most real intents and purposes “articulated” basically means a single vehicle with two pivoting or differentially moving components permanently or semi-permanently coupled together (i.e. you could call a steam locomotive and tender “articulated” – maybe – but not a train).
And again, your damn Captcha will not work properly. Apparently “four + 16 =/= 18”. I will reload in hopes of finding numbers that accord with normal laws of mathematics.
Hello Samuel,
With regards to articulated and coupled, we are following the actual usage by the US army in the development of this (and many other) such vehicles. Articulated vehicles are those in which the individual parts of the vehicle CANNOT function separately, while coupled vehicles (such as the M226) are those in which the parts CAN function separately. I feel the article transmits this well-enough.
Also, fortunately for our Captcha and the entire branch of mathematics, 4+16 is equal 20. Don’t be so quick to blame the computer 🙂
Why do you say ‘the A-frame was mounted on the back of the leading vehicle” when the pictures clearly show the 3-point frame mounted to the nose of the rear unit?
Mistake on our part, fixed.
I dont think that rear unit was “re-painted 3-tone camouflage”. I cannot imagine why they would have taken the rear unit only and went through the trouble of painting it 3-tone combat camo, when it’s clearly a research vehicle; if you were doing it because you wanted all army vehicles to match, you wouldn’t paint just ONE unit and leave the other. Makes no sense. I think its more likely that something happened to the original rear unit (fire?) and so they found another spare M113, which was already painted in the new 3-tone camo, and modified that to be a new rear unit. It doesnt sound like it takes much work. They didnt bother painting the front one to match, and they didnt need the fancy paint markings any more, so they didnt add new ones to te rear unit.
Or, pure speculation, the rear unit was removed one day and sent to a depot for routine maintenance. When there, some dull soldier-mechanics/workers, following the letter of the policy stating “all M113 APCs are to be painted the new 3-tone camo color when they come in for their 5-year overhauls”, went ahead and did the same to the half-M226 (or is it only an M226 when bolted to the other half?), with the result that the people in charge were swearing about having their fancy test markings painted over by a bunch of slack-jawed greasemonkey maintenance depot types. It’s plausible enough; I cannot imagine any other way they ended up with only half of it painted. I am positive they didnt do it on purpose.
There is no mention of any fire (which would have surely been talked about) or any other of the reasons you are specifying in the original documentation which we have consulted in the writing of this article (and which you can find listed in the Sources section). While speculation is healthy in certain occasions, we stayed away from it on this occasion.
It reminds me of the Jacquet Assault Train, The French project in WW2. This method of joining the two armored vehicles. could be useful if. one had broken down or was immobile. the working one could act as a tug.